I have been planning to build this for a long time. Once I had some free time I went to my local hacker/maker space (TAMI) and built this high resolution multispectral imaging system. The system is comprised from more than 30 different LED colors (up to a whopping 992 LED colors on a single i2c) and a dark room - box with top 1/3 aluminium foil (Styrofoam is another option) as close as I can get to evenly diffuse the light, and 2/3 bottom thin black cardboard (black velvet might be a better solution but couldn't find one locally) as close as i can get to no background reflection
Its a simple design of multi color LED built in a series of 4 in order to get higher luminosity. I started with sourcing different colors of high intensity LEDs about 0.5usd each.


placed them all in a nice order on top of an aluminium sheet (heatsink)


Each of the LEDs series is connected to a mosfet and mux (pca9685), thinking about replacing the pca9685 with pca9635 (1khz vs 97khz) and adding a phototransistor for closed loop tweaking of the LEDs PWM. Might as well check the rise and fall time for each of the LEDs series. For the constant current source I used a single mean well LED driver (ldd-700h), for the controller at the moment I’m using a raspberry pi (code is at the bottom) built a nice dark box for them.


Tested them before installation
Some more testing (white a4 paper and a reflectance standard)
Tested all of the colors with a spectrometer ~370nm up to ~880nm and white 2.7k, 6k, 10k
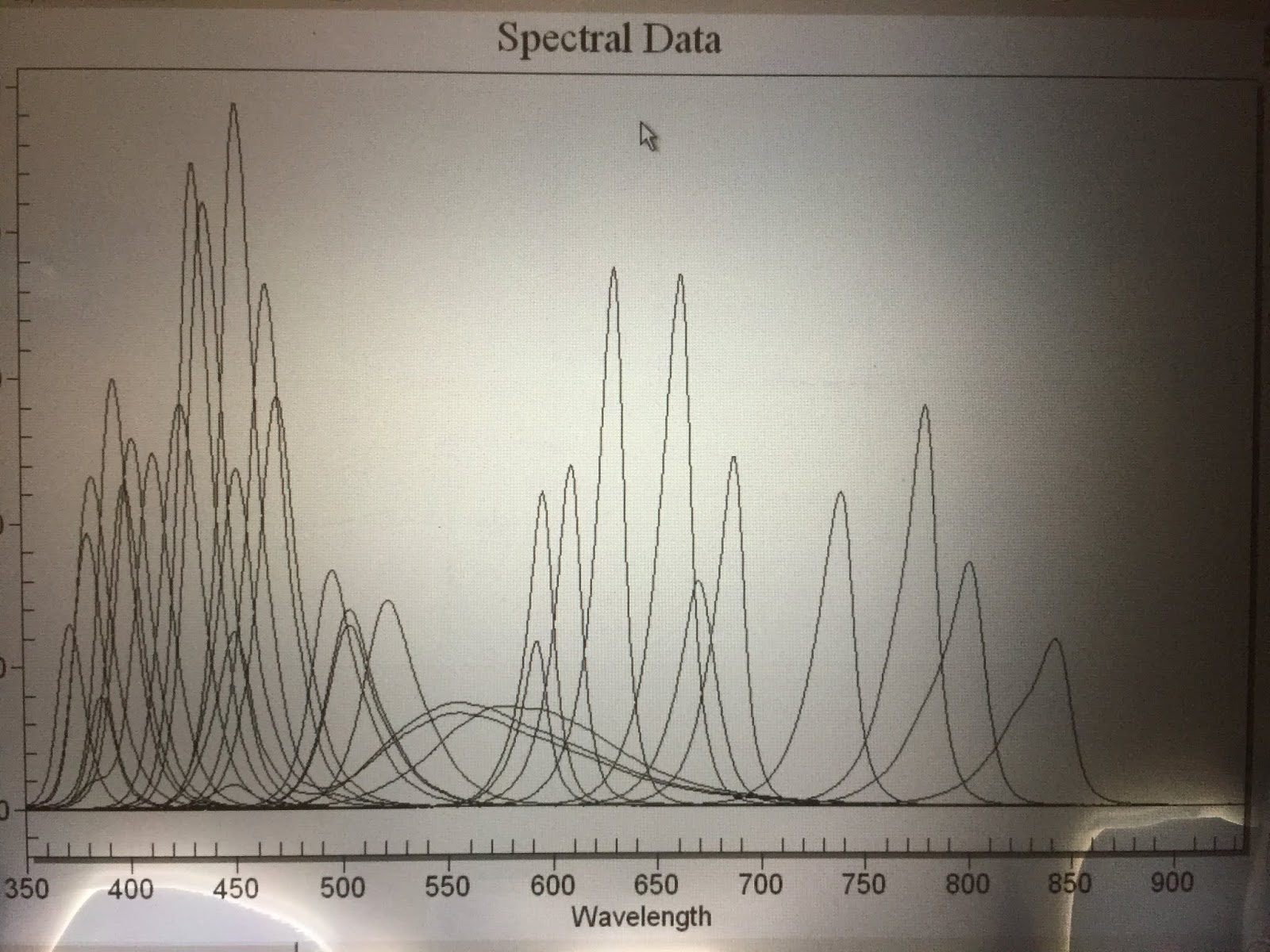
Sorry about the screen photo, I got the x61t ips with the glue problem..
still need to drill a large hole at the center of the aluminium plate for the imaging part (ids monochromatic camera). Notes to myself: find a photodiode (FDS010 ?) to get real PWM value and light intensity photo-diode/transistor should match the LEDs spectra. Found a photodiode in my junk box (FDS10X10?, S2387-1010R? , 340nm-110nm ?)

So at the moment i hope it will be sufficient seems like the LTC1050 is a standard for converting the photodiode current to voltage.
A quick dirty phone video of the laptop screen (avocado leaf),taken with a monochromatic camera, no calibration yet or sync between the camera and the LEDs, sorry for that.
Imaging setup update:
Added a touch screen - still to be done is a fix for the eGalax driver (apt install xserver-xorg-input-evdev, edit /etc/X11/xorg.conf replace 'libinput' with 'evdev' ,apt install xinput-calibrator, swap x-y touchscreen axes).
Run everything from the same power source (LEDs driver 15v, screen 12v, pi 5v)


Drilled a hole

System test with a temporary camera mount

Picked some pieces of anodized aluminium from TAMI
and used it to build this adjustable universal camera mount




Update:
Its important that only reflected light from the tested object will enter the lens
so I measured the hole and found a suitble plumbing pvc tube that fit like a glove.
I cut it just too short to my taste (i figured the longer it will be the better end result)
measured hole

measured plumbing pvc tube

changed the lens for a wider FOV

Looks like an improvement has been done even if the tube should be much longer (guess something of at least 10 cm). I might extend it with a black cardboard temporary and wrap its outer side with an aluminium foil.

Painted it with black paint the outer part will be covered with aluminium foil once dried

Another video, this time its a grapevine leaf (LED intensity isn't calibrated yet!
and some bands are well absorbed by the leaf, plus it didn't help to have the
lens shutter almost fully closed. I will try to make a new video tomorrow or so)
The bore like image is due to a bit longer tube (20 cm) then wanted so that
the FOV (field of view) of the image is catching the end of the tube- on my to do list is to make an adjustable length tube for different lenses.
Screen capture (simplescreencapture)
Updated photo of the station

Added magnetic door latch

Another video, lost couple of frames due to lack of power of the raspberry pi, this time its a potato leaf, and some opencv image processing (CLAHE equalize and corresponding histograms)
while waiting for the nvidia jetson to arrive
i thought ill handle some of the cosmetics :)



and my present is ready to openly take multi-spectral images ;)
ill update the code once everything will be finished
but its a start to whom who has no patience to wait:
from __future__ import division
import time
import Adafruit_PCA9685
import cv2
from pyueye import ueye
import ctypes
import datetime
pwm = Adafruit_PCA9685.PCA9685(address = 0x40) #1st
pwm1 = Adafruit_PCA9685.PCA9685(address = 0x41) #2nd
pwm2 = Adafruit_PCA9685.PCA9685(address = 0x42) #3rd
pwm.set_pwm_freq(1000)
pwm1.set_pwm_freq(1000)
pwm2.set_pwm_freq(1000)
spec = "avo_leaf" #name of speciment
led = [0,1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19,20,21,22,23,24,25,26,27,28,29,30,31]
lux = [1900,1901,1902,1903,1904,1905,1906,1907,1908,1909,1910,1911,1912,1913,1914,1915,1916,1917,1918,1919,1920,1921,1922,1923,1924,1925,1926,1927,1928,1929,1930,1931] #temporary initial value 0, 4095
for x,y in zip(led, lux):
if (x < 16):
pwm.set_pwm(x,y,0) #led on 1st mux
elif ( x>14 and x<32):
pwm1.set_pwm(x-16,y,0) #led on 2nd mux
elif (x>31 and x<33):
pwm2.set_pwm(x-32,y,0) #led on 3rd mux
else:
print(x)
hcam = ueye.HIDS(1)
pccmem = ueye.c_mem_p()
memID = ueye.c_int()
hWnd = ctypes.c_voidp()
ueye.is_InitCamera(hcam, hWnd)
sensorinfo = ueye.SENSORINFO()
ueye.is_GetSensorInfo(hcam, sensorinfo)
ueye.is_AllocImageMem(hcam, sensorinfo.nMaxWidth, sensorinfo.nMaxHeight,24, pccmem, memID)
ueye.is_SetImageMem(hcam, pccmem, memID)
nret = ueye.is_FreezeVideo(hcam, ueye.IS_WAIT)
if (nret == 0):
print("camera")
else:
print("____problem!!!____")
FileParams = ueye.IMAGE_FILE_PARAMS()
FileParams.pwchFileName = spec + "_led_"+str(x+1)+"_cam_"+ datetime.datetime.now().strftime("%s") + ".bmp"
FileParams.nFileType = ueye.IS_IMG_BMP
FileParams.ppcImageMem = None
FileParams.pnImageID = None
nret = ueye.is_ImageFile(hcam, ueye.IS_IMAGE_FILE_CMD_SAVE, FileParams, ueye.sizeof(FileParams))
if (nret == 0):
print("camera")
else:
print("____problem!!!____")
ueye.is_FreeImageMem(hcam, pccmem, memID)
ueye.is_ExitCamera(hcam)
if (x < 16):
pwm.set_pwm(x,0,0) #led off 1st mux
elif ( x>14 and x<32):
pwm1.set_pwm(x-16,0,0) #led off 2nd mux
elif (x>31 and x<33):
pwm2.set_pwm(x-32,0,0) #led off 3rd mux
else:
print(x)
All in all it is a fun project to build and I’m looking forward to begin revision 2.0: Replace the raspberry pi (~35$) with nvidia jetson nano (~99$), maybe add small ml training for contrast, rebuild the bottom half for better light absorption, source multiple color lasers, use fiber optics bundle for multiple angles and make the system portable (smaller / folding capability, battery powered).
update: Aug 26 2022
and watch their video
גדולללללללללל
ReplyDeleteNice
ReplyDeleteAs a real Jewish, you made economy on explanation.It was good to have schematic diagram of connections, to have schematic of LED placement on aluminium board (color order) and another details that can help repeat the device. So, let consider improve details.
ReplyDeleteHi--this looks really great! Did you ever wind up publishing your code? I'd also love to see a circuit diagram for how the pca9685s and ldd-700h fit together, and specs about which colors LEDs you used--basically any more detail you've got would be much appreciated!
ReplyDelete